Das Vektorsumme ist die Additionsoperation zwischen Vektoren, die zu einem anderen Vektor führt. Vektoren zeichnen sich durch Größe sowie Richtung und Sinn aus. Daher ist es im Allgemeinen nicht möglich, sie hinzuzufügen, wie dies bei skalaren Größen der Fall wäre, dh durch Hinzufügen von Zahlen.
Der aus der Summe mehrerer Vektoren erhaltene Vektor wird aufgerufen resultierender Vektor. In der Mechanik sprechen sie über die resultierende Kraft, Dies ist die Vektorsumme aller Kräfte auf einen Körper. Diese Resultierende entspricht der Menge oder dem System der Kräfte.
Um den Summenvektor vollständig zu spezifizieren, müssen die Größe und die Einheit, die Richtung und der Sinn angegeben werden.
Es ist wichtig zu beachten, dass Vektoren beim Hinzufügen dieselbe physikalische Größe darstellen müssen, daher ist die Vektorsumme eine homogene Operation. Dies bedeutet, dass wir eine Kraft zu einer anderen hinzufügen können, aber keine Kraft mit einer Verschiebung, da das Ergebnis bedeutungslos ist.
Es gibt verschiedene Methoden, um den resultierenden Vektor zu finden: grafisch und analytisch. Um Vektorsummen mit grafischen Methoden zu finden, gehen wir von einer einfachen Darstellung für einen Vektor aus, nämlich einem orientierten Segment oder Pfeil wie diesem:

Vektoren werden durch fett gedruckte Buchstaben im gedruckten Text oder durch einen Pfeil über dem Buchstaben gekennzeichnet, um sie von ihren jeweiligen Größen oder skalaren Größen zu unterscheiden. Zum Beispiel die Größe des Vektors v Es ist einfach v.
Artikelverzeichnis
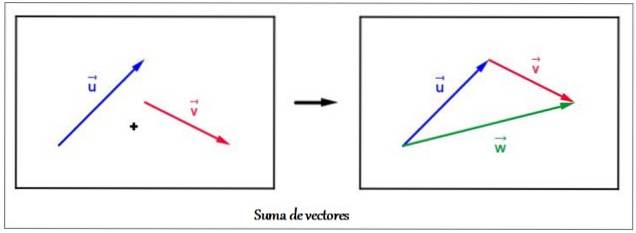
Um mehr als zwei koplanare Vektoren hinzuzufügen, wird die Polygonmethode oder Traversenmethode, Dies besteht darin, sich parallel zu jedem der Addend-Vektoren zu übersetzen. Ein Merkmal von Vektoren ist, dass sie in Bezug auf die Übersetzung unveränderlich sind. Daher werden wir diese Eigenschaft verwenden, um die Summe zu ermitteln.
Wir beginnen mit einem der Vektoren, da die Vektoraddition kommutativ ist und die Reihenfolge der Addenden die Summe nicht ändert. Der zweite Vektor wird als nächstes übersetzt und stimmt seinen Ursprung mit dem Ende des ersten überein.
Dann wird es zum nächsten Vektor gebracht und nach dem gleichen Verfahren, bei dem der Ursprung mit dem Ende des vorherigen übereinstimmen soll, als nächstes platziert. Gehen Sie auf diese Weise vor, bis der letzte Vektor positioniert ist.
Der resultierende Vektor ist derjenige, der den Ursprung des ersten mit dem freien Ende des letzten verbindet. Der Name dieser Methode stammt aus der resultierenden Abbildung: ein Polygon.
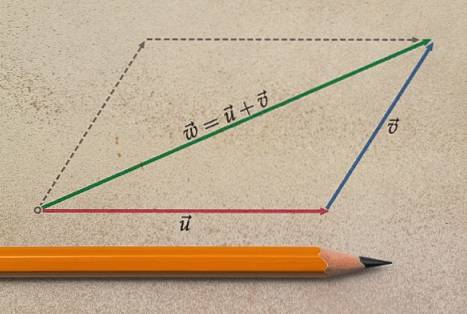
Nehmen wir als Beispiel die Summe zweier Vektoren oder Y. v in der Abbildung oben gezeigt.
Beginnend mit dem Vektor oder, zum Vektor verschoben v um seinen Ursprung mit dem Ende des ersten abzugleichen. Der resultierende Vektor w wird aus dem Ursprung von gezogen oder bis zum Ende von v, eine dreiseitige Figur bilden: ein Dreieck. Deshalb wird in diesem speziellen Fall die Prozedur aufgerufen Dreiecksmethode.
Beachten Sie ein wichtiges Detail: Die Größe oder das Modul des resultierenden Vektors ist nicht die Summe der Module der hinzugefügten Vektoren. Tatsächlich ist es fast immer weniger, es sei denn, die Vektoren sind parallel..
Mal sehen, was in diesem Fall unten passiert.
Das beschriebene Verfahren kann auch auf den Sonderfall angewendet werden, bei dem die Vektoren parallel sind. Betrachten wir das folgende Beispiel:

Es bleibt dem Vektor überlassen v in seiner ursprünglichen Position und wird in den Vektor übersetzt oder so, dass sein Ursprung mit dem Ende von übereinstimmt v. Nun wird ausgehend vom Ursprung von ein Vektor gezeichnet v und beendet das Ende von oder.
Dies ist der resultierende Vektor w und seine Größe ist die Summe der Größen der Addenden. Die Richtung und der Sinn der drei Vektoren sind gleich.
Der resultierende Vektor hat einen maximalen Modul, wenn die Addenden wie im Beispiel einen Winkel von 0º zueinander bilden. Wenn die Vektoren einen Winkel von 180º zueinander bilden, hat der resultierende Vektor einen minimalen Modul.
Ein Radfahrer fährt zuerst 3 km in Richtung Norden und dann 4 km in Richtung Westen. Ihre Verschiebung, die wir nennen R., ist leicht zu finden mit der Dreiecksmethode plus einem Referenzrahmen, in dem die Kardinalpunkte markiert sind:
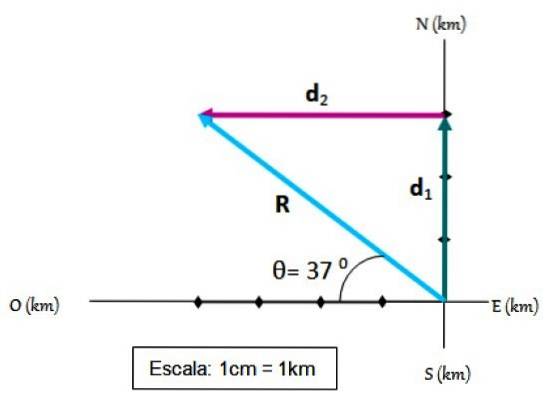
-Der Ausgangspunkt soll mit dem Ursprung des Referenzsystems übereinstimmen.
-Auf den Koordinatenachsen wird eine Skala gewählt, die in diesem Fall 1 cm = 1 km beträgt
-Die erste Verschiebung ist maßstabsgetreu gezeichnet d1.
-Dann zu d1 Der zweite Versatz wird gezeichnet dzwei, auch maßstabsgetreu.
-Die resultierende Verschiebung R. ist ein Vektor, der vom Ursprung bis zum Ende von geht dzwei.
-Die Größe von R. Wird mit einem abgestuften Lineal gemessen, ist es leicht zu überprüfen, ob R = 5 ist.
-Endlich der Winkel, den R. Die Form mit der Horizontalen wird mit Hilfe eines Winkelmessers gemessen und es ergibt sich θ = 37 0
Ein Schwimmer will einen Fluss überqueren und schwimmt dazu mit einer Geschwindigkeit von 6 km / h senkrecht zum Ufer, aber eine Strömung mit einer Geschwindigkeit von 4 km / h lenkt ihn ab.
Um die resultierende Geschwindigkeit zu ermitteln, werden die Geschwindigkeitsvektoren des vertikal gezeichneten Schwimmers und des horizontal dargestellten Stroms addiert.
Nach der grafischen Methode wird die resultierende Geschwindigkeit erhalten vR.::
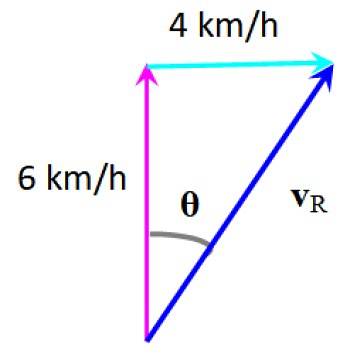
Die Auslenkung des Schwimmers kann berechnet werden durch:
θ = arctg (4/6) = 33,7º rechts von seiner Anfangsrichtung
Die Größe seiner Geschwindigkeit wird durch die Tatsache erhöht, dass die Geschwindigkeit des Flusses vektoriell addiert wird. Sie können es finden, indem Sie eine Skala sorgfältig einstellen, wie im obigen Beispiel.
Oder mit Hilfe der trigonometrischen Verhältnisse von 33,7º:
sin 33,7º = 4 / vR.
vR. = 4 / sin 33,7º = 7,21 km / h
Die folgenden Kräfte wirken auf ein Teilchen, dessen Größen nachstehend aufgeführt sind:
F.1= 2,5 N; F.zwei= 3 N; F.3= 4 N; F.4= 2,5 N.
Finden Sie die resultierende Kraft.
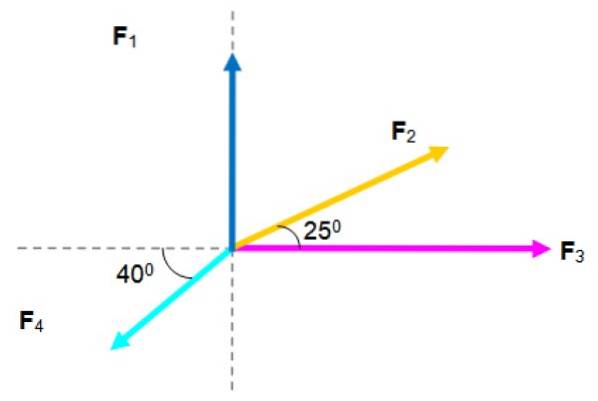
Wir können grafisch beginnend mit jedem der Vektoren hinzufügen, da die Vektorsumme kommutativ ist.
In Abbildung A haben wir begonnen F.1. Beim Erstellen einer Skala und mit Hilfe eines Lineals und eines Quadrats werden die anderen Vektoren übertragen, um sie nacheinander zu platzieren..
Der Vektor F.R. richtet sich nach dem Ursprung von F.1 bis zum Ende von F.4. Seine Größe beträgt 5,2 N und er bildet einen Winkel von 26,5 ° zur Horizontalen.
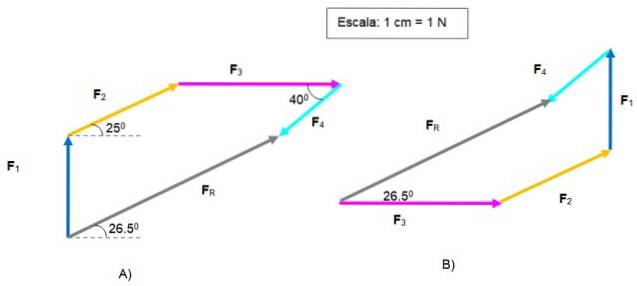
In Abbildung B wurde das gleiche Problem gelöst, beginnend mit F.3 und endet mit F.4, gleich werden F.R. .
Die Polygone sind unterschiedlich, aber das Ergebnis ist das gleiche. Der Leser kann den Test durchführen, indem er die Reihenfolge der Vektoren erneut ändert.



Bisher hat noch niemand einen Kommentar zu diesem Artikel abgegeben.