
Das Trägheitsmoment eines starren Körpers in Bezug auf eine bestimmte Drehachse stellt seinen Widerstand gegen die Änderung seiner Winkelgeschwindigkeit um die Achse dar. Es ist proportional zur Masse und auch zum Ort der Rotationsachse, da sich der Körper entsprechend seiner Geometrie leichter um bestimmte Achsen drehen kann als in anderen.
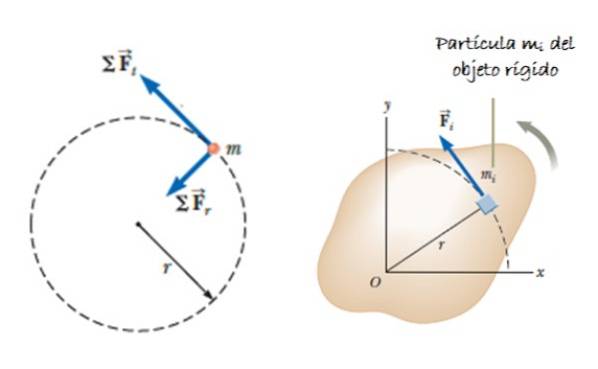
Angenommen, ein großes Objekt (bestehend aus vielen Partikeln) kann sich um eine Achse drehen. Angenommen, eine Kraft wirkt F., tangential auf das Massenelement aufgebracht Δmich, das erzeugt ein Drehmoment oder Moment, gegeben durch τNetz = ∑rich x F.ich. Der Vektor rich ist die Position von Δmich (siehe Abbildung 2).

Dieses Moment ist senkrecht zur Rotationsebene (Richtung) +k = aus dem Papier kommen). Da die Kraft und der radiale Positionsvektor immer senkrecht sind, bleibt das Kreuzprodukt:
τNetz = ∑ F.ich rich k = ∑ (Δmich zuich) rich k = ∑ Δmich (zuich rich ) k
Beschleunigung aufich stellt die tangentiale Komponente der Beschleunigung dar, da die radiale Beschleunigung nicht zum Drehmoment beiträgt. In Abhängigkeit von der Winkelbeschleunigung α können wir Folgendes angeben:
zuich = α rich
Daher sieht das Nettodrehmoment folgendermaßen aus:
τNetz = ∑ Δmich (α richzwei) k = ((∑ richzwei Δmich) α k
Die Winkelbeschleunigung α ist für das gesamte Objekt gleich, wird daher vom Index „i“ nicht beeinflusst und kann die Summation verlassen, die genau das Trägheitsmoment des durch den Buchstaben I symbolisierten Objekts ist:
I = ∑ richzwei Δmich
Dies ist das Trägheitsmoment einer diskreten Massenverteilung. Wenn die Verteilung kontinuierlich ist, wird die Summation durch ein Integral und ersetzt Δm wird ein Massendifferential dm. Das Integral wird über das gesamte Objekt ausgeführt:
I = ∫M.(rzwei) dm
Die Einheiten des Trägheitsmoments im SI International System sind kg x mzwei. Es ist eine skalare und positive Größe, da es das Produkt einer Masse und des Quadrats einer Entfernung ist.
Artikelverzeichnis
Ein erweitertes Objekt, z. B. ein Balken, eine Scheibe, eine Kugel oder ein anderes Objekt, dessen Dichte ρ ist konstant und weiß, dass die Dichte das Masse-Volumen-Verhältnis, das Massendifferential ist dm ist geschrieben als:
ρ = dm / dV → dm = ρdV
Wenn wir das Trägheitsmoment durch das Integral ersetzen, haben wir:
I = ∫rzwei ρdV = ρ ∫rzweidV
Dies ist ein allgemeiner Ausdruck, der für ein dreidimensionales Objekt gilt, dessen Volumen V. und Position r sind Funktionen der Raumkoordinaten x, Y. Y. z. Beachten Sie, dass die Dichte konstant ist und außerhalb des Integrals liegt.
Die Dichte ρ Es ist auch als Volumendichte bekannt, aber wenn das Objekt sehr flach wie ein Blatt oder sehr dünn und schmal wie ein Stab ist, können andere Formen der Dichte verwendet werden.
- Für ein sehr dünnes Blech beträgt die zu verwendende Dichte σ, die Oberflächendichte (Masse pro Flächeneinheit) und gibt ist das Flächendifferential.
- Und wenn es sich um einen dünnen Balken handelt, bei dem nur die Länge relevant ist, wird die lineare Massendichte verwendet λ und eine Längendifferenz gemäß der als Referenz verwendeten Achse.
In den folgenden Beispielen werden alle Objekte als starr (nicht verformbar) betrachtet und haben eine gleichmäßige Dichte.
Hier berechnen wir das Trägheitsmoment eines dünnen, starren, homogenen Stabes der Länge L und der Masse M in Bezug auf eine Achse, die durch die Mitte verläuft.
Zunächst muss ein Koordinatensystem erstellt und eine Figur mit der entsprechenden Geometrie wie folgt erstellt werden:
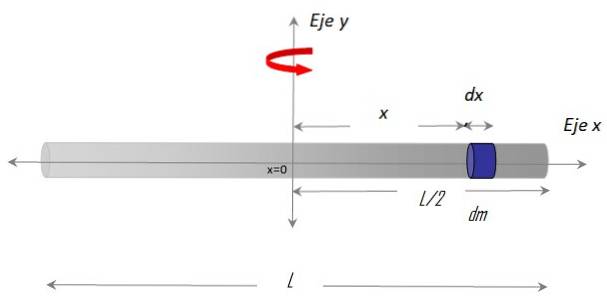
Das X-Achse entlang der Bar und der Achse y als Drehachse. Das Verfahren zum Festlegen des Integrals erfordert auch die Auswahl eines Massendifferentials über dem Stab, genannt dm, das hat eine unterschiedliche Länge dx und befindet sich an der Position x willkürlich, relativ zur Mitte x = 0.
Nach der Definition der linearen Massendichte λ:
λ = M / L.
Da die Dichte einheitlich ist, was für M und L gilt, gilt sie auch für dm und dx:
λ = dm / dx → dm = λdx.
Andererseits befindet sich das Massenelement in der Position x, Wenn wir dann diese Geometrie in der Definition einsetzen, erhalten wir ein bestimmtes Integral, dessen Grenzen die Enden des Balkens gemäß dem Koordinatensystem sind:
Einsetzen der linearen Dichte λ = M / L:
Um das Trägheitsmoment des Stabes in Bezug auf eine andere Rotationsachse zu ermitteln, beispielsweise eine, die durch eines seiner Extreme verläuft, können Sie den Steiner-Satz verwenden (siehe Übung am Ende gelöst) oder eine direkte Berechnung durchführen, die der einen ähnlich ist hier gezeigt, aber die Geometrie entsprechend modifizieren.
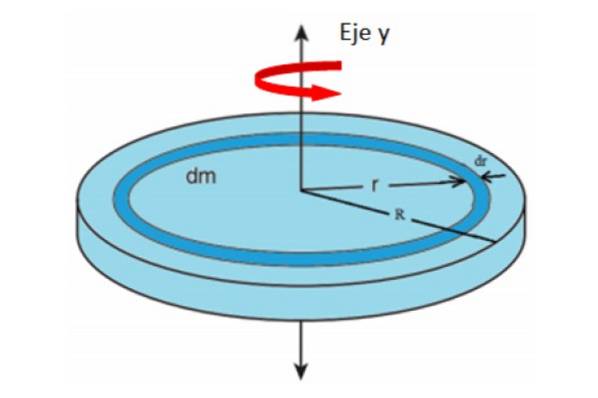
Eine sehr dünne Scheibe von vernachlässigbarer Dicke ist eine flache Figur. Wenn die Masse gleichmäßig über die gesamte Oberfläche der Fläche A verteilt ist, beträgt die Massendichte σ:
σ = M / Y.
So viel dm Was gibt entsprechen der Masse und der Fläche des in der Abbildung gezeigten Differentialrings. Wir gehen davon aus, dass sich die gesamte Baugruppe um die y-Achse dreht.
Sie können sich vorstellen, dass die Scheibe aus vielen konzentrischen Ringen mit Radius besteht r, jedes mit seinem jeweiligen Trägheitsmoment. Addiere die Beiträge aller Ringe bis zum Erreichen des Radius R., Das gesamte Trägheitsmoment der Platte beträgt.
σ = dm / dA → dm = σgibt
Wobei M die gesamte Masse der Platte darstellt. Die Fläche einer Platte hängt von ihrem Radius r ab als:
A = π.rzwei
Ableiten in Bezug auf r:
dA / dr = 2 = 2π.r → dA = 2π.rdr
Einsetzen des Obigen in die Definition von I:
Einsetzen von σ = M / (π.Rzwei ) Überreste:
%5Cleft&space;(%5Cfrac%7BR%5E%7B4%7D%7D%7B4%7D&space;%5Cright&space;)=%5Cfrac%7B1%7D%7B2%7DMR%5E%7B2%7D)
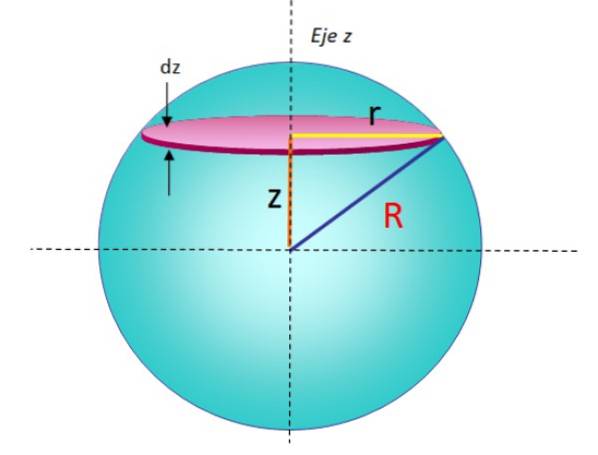
Eine Kugel mit dem Radius R kann als eine Reihe von übereinander gestapelten Scheiben betrachtet werden, wobei jede Scheibe eine infinitesimale Masse aufweist dm, Radio r und Dicke dz, hat einen Trägheitsmoment gegeben durch:
gegebenScheibe = (½) rzweidm
Um dieses Differential zu finden, haben wir einfach die Formel aus dem vorherigen Abschnitt genommen und ersetzt M. Y. R. zum dm Y. r, beziehungsweise. Eine solche Scheibe ist in der Geometrie von Abbildung 5 zu sehen.
Durch Addition aller infinitesimalen Trägheitsmomente gestapelter Scheiben wird das gesamte Trägheitsmoment der Kugel erhalten:
ichKugel = ∫dIScheibe
Welches ist gleichbedeutend mit:
I = ∫Kugel (½) rzweidm
Um das Integral zu lösen, müssen Sie ausdrücken dm richtig. Wie immer wird es aus der Dichte erreicht:
ρ = M / V = dm / dV → dm = ρ.dV
Das Volumen einer Differenzplatte beträgt:
dV = Grundfläche x Höhe
Die Höhe der Scheibe ist die Dicke dz, während der Bereich der Basis ist πrzwei, So:
dV = πrzweidz
Und wenn man das vorgeschlagene Integral ersetzt, sieht es so aus:
I = ∫Kugel(½) rzweidm = ∫ (½) rzwei(ρπrzweidz)
Vor der Integration muss jedoch beachtet werden, dass r - der Radius der Scheibe - von z und R - dem Radius der Kugel - abhängt, wie aus Abbildung 5 ersichtlich ist.
R.zwei = rzwei + zzwei → rzwei = R.zwei - zzwei
Was uns führt zu:
I = ∫Kugel(½) ρ rzwei(πrzweidz) = ∫Kugel(½) ρ π r4dz= ∫Kugel(½) ρ π (R.zwei - zzwei)zwei dz
Um sich über die gesamte Kugel zu integrieren, stellen wir fest, dass z zwischen -R und R variiert, daher:
Wissend, dass ρ = M / V = M / [(4/3) πR3]] schließlich wird es nach Vereinfachung erhalten:
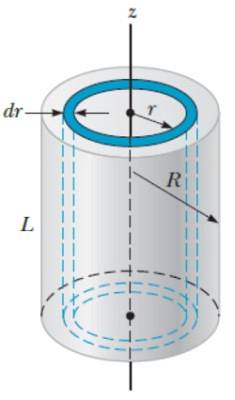
Für dieses Objekt wird eine ähnliche Methode wie für die Kugel verwendet. Nur diesmal ist es einfacher, wenn man sich vorstellt, dass der Zylinder aus zylindrischen Schalen mit Radius besteht r, Dicke DR und Höhe H., als wären sie die Schichten einer Zwiebel.
Die Lautstärke dV einer zylindrischen Schicht ist:
dV = 2π.rL.dr
Daher ist die Schalenmasse:
dm = ρ.dV = ρ. 2π.r.L.dr
Dieser Ausdruck wird in der Definition des Trägheitsmoments ersetzt:
Die obige Gleichung zeigt, dass das Trägheitsmoment des Zylinders nicht von seiner Länge abhängt, sondern nur von seiner Masse und seinem Radius. Ja L. geändert, würde das Trägheitsmoment um die axiale Achse gleich bleiben. Deshalb, ich des Zylinders stimmt mit der der zuvor berechneten dünnen Scheibe überein.
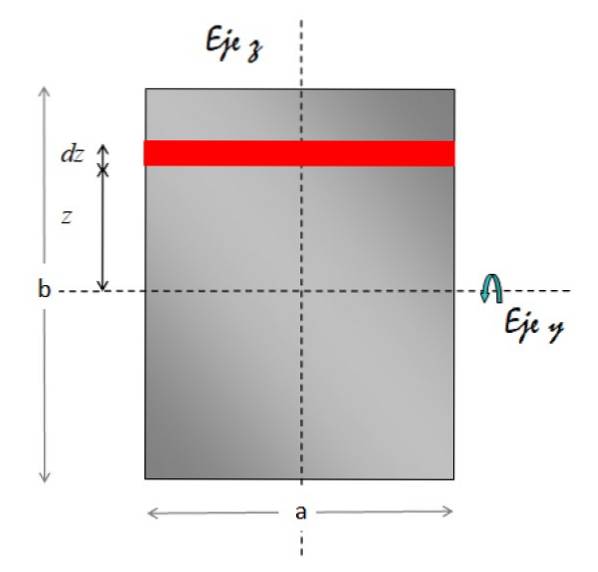
Das Achse y horizontale Drehachse. Die folgende Abbildung zeigt die zur Durchführung der Integration erforderliche Geometrie:
Das rot markierte Flächenelement ist rechteckig. Seine Fläche ist Basis x Höhe, daher:
dA = a.dz.
Daher ist das Massendifferential:
dm = σ.dA = σ. (a.dz)
In Bezug auf den Abstand vom Flächenelement zur Rotationsachse ist dies immer der Fall z. All dies ersetzen wir im Integral des Trägheitsmoments:
Nun wird die Oberflächenmassendichte σ ersetzt durch:
σ = M / ab
Und es sieht definitiv so aus:
Beachten Sie, dass es wie bei der dünnen Stange ist.
Für ein Seitenquadrat L., Ersetzen Sie im vorherigen Ausdruck, der für ein Rechteck gültig ist, einfach den Wert von b für das von L.::
Es gibt zwei Sätze, die besonders nützlich sind, um die Berechnung von Trägheitsmomenten um andere Achsen zu vereinfachen, die ansonsten aufgrund mangelnder Symmetrie schwer zu finden wären. Diese Sätze sind:
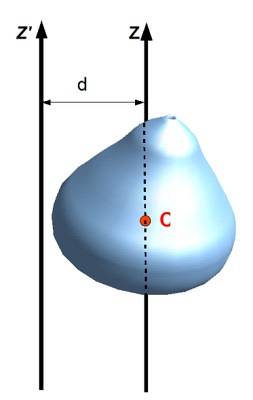
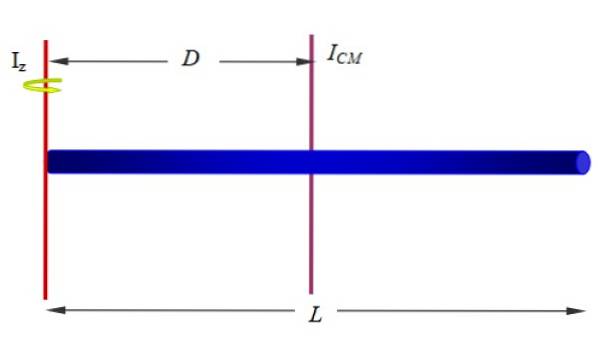
Auch genannt Satz der parallelen Achsen, bezieht sich auf das Trägheitsmoment in Bezug auf eine Achse mit einer anderen, die durch den Massenschwerpunkt des Objekts verläuft, solange die Achsen parallel sind. Um es anzuwenden, ist es notwendig, den Abstand D zwischen beiden Achsen und natürlich die Masse M des Objekts zu kennen.
Sein ichz das Trägheitsmoment eines erweiterten Objekts in Bezug auf die z-Achse, I.CM das Trägheitsmoment in Bezug auf eine Achse, die durch den Schwerpunkt (CM) des Objekts verläuft, dann ist es wahr, dass:
ichz = IchCM + MDzwei
Oder in der Notation der folgenden Abbildung: ichz ' = Ichz + Mdzwei
Dieser Satz wird auf ebene Flächen angewendet und sieht folgendermaßen aus: Das Trägheitsmoment eines ebenen Objekts um eine dazu senkrechte Achse ist die Summe der Trägheitsmomente um zwei Achsen senkrecht zur ersten Achse:
ichz = Ichx + ichY.
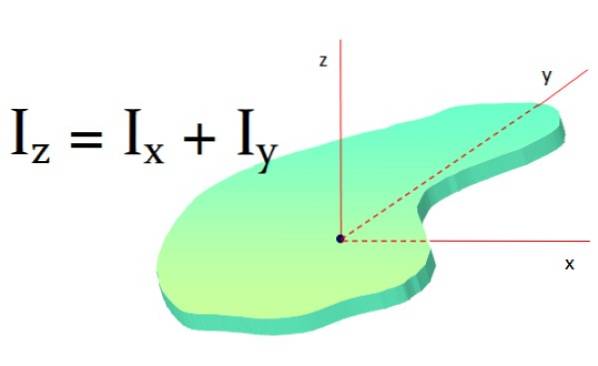
Wenn das Objekt so symmetrisch ist, dass ichx und ichY. gleich sind, dann ist es wahr, dass:
ichz = 2Ix
Ermitteln Sie das Trägheitsmoment der Stange in Bezug auf eine Achse, die durch eines ihrer Enden verläuft, wie in Abbildung 1 (unten und rechts) und Abbildung 10 dargestellt.
Lösung:
Wir haben bereits das Trägheitsmoment des Balkens um eine Achse, die durch sein geometrisches Zentrum verläuft. Da der Stab homogen ist, befindet sich sein Schwerpunkt an diesem Punkt, also wird dies unser sein ichCM Steiners Satz anzuwenden.
Wenn die Länge des Balkens ist L., Die z-Achse befindet sich in einem Abstand D = L / 2, daher:
ichz = IchCM + MDzwei= (1/12) MLzwei+M (L / 2)zwei= (1/3) MLzwei



Bisher hat noch niemand einen Kommentar zu diesem Artikel abgegeben.